
点击查看目录
背景介绍
Apache SkyWalking 观察部署在服务网格中的服务的度量、日志、追踪和事件。在进行故障排除时,SkyWalking 错误分析是一个宝贵的工具,可以帮助确定错误发生的位置。然而,确定性能问题更加困难:利用预先存在的观察数据往往不可能找到性能问题的根本原因。为此,动态调试和故障排除在进行服务性能剖析时就必不可少。在这篇文章中,我们将讨论如何使用 eBPF 技术来改进 SkyWalking 中的剖析功能,并用于分析服务网格中的性能影响。
SkyWalking 中的追踪剖析
自 SkyWalking 7.0.0 以来,Trace Profiling 通过定期对线程堆栈进行采样,让开发者知道运行哪行代码花费更多时间,从而帮助开发者发现性能问题。然而,Trace Profiling 不适合以下情况:
- 线程模型:Trace Profiling 对于剖析在单线程中执行的代码最有用。它对严重依赖异步执行模式的中间件不太有用。例如,Go 中的 Goroutines 或 Kotlin Coroutines。
- 语言:目前,Trace Profiling 只支持 Java 和 Python,因为在 Go 和 Node.js 等一些语言的运行时中不容易获得线程栈。
- Agent 绑定:Trace Profiling 需要安装 Agent,根据语言的不同,这可能很麻烦(例如,PHP 必须依赖其 C 内核;Rust 和 C/C++ 需要的仪器需要手动安装)。
- 关联性:由于追踪剖析只与单个请求相关,所以当无法确认哪个请求产生问题时则变得难已处理。
- 生命周期短的服务:由于(至少)两个原因,Trace Profiling 不支持短声明周期的服务:
- 在启动阶段,很难区分系统性能和类代码操作。
- Trace Profiling 与一个端点相连,以识别性能影响,但没有端点来匹配这些短生命周期的服务。
幸运的是,有一些技术比 Trace Profiling 更实用。
eBPF 简介
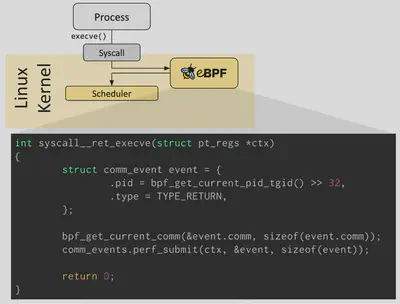
我们发现,eBPF —— 一种可以在操作系统内核中运行沙盒程序的技术,从而安全有效地扩展内核的功能,而不需要修改内核或加载内核模块,可以帮助我们填补 Trace Profiling 留下的空白。eBPF 技术正在流行,因为它打破了传统上的用户和内核空间之间的障碍。现在我们可以将程序作为字节码注入到内核中运行,而不需要定制和重新编译内核。可观测可以很好地利用这一点。
在下图中,我们可以看到,当系统执行 execve 系统调用时,eBPF 程序被触发,通过使用函数调用获得当前进程的运行时信息。
使用 eBPF 技术,可以将 SkyWalking 的剖析能力范围扩大到:
- 全局性能剖析:在 eBPF 之前,数据收集被限制在代理可以观察的范围内。由于 eBPF 程序在内核中运行,它们可以观察到所有的线程。当你不确定某个性能问题是否是由一个特定的请求引起的,这一点特别有用。
- 数据内容:eBPF 可以转储用户和内核空间的线程栈,所以如果性能问题发生在内核空间就更容易被发现。
- 代理绑定:所有现代 Linux 内核都支持 eBPF,所以不需要安装任何东西。这意味着它是一个免编排与代理的模型。这减少了由内置软件引起的摩擦,这些软件可能没有安装正确的代理,如服务网格中的 Envoy。
- 采样类型:与追踪剖析不同,eBPF 是事件驱动的,因此,不受间隔轮询的限制。例如,eBPF 可以触发事件,并根据传输大小的阈值收集更多的数据。这可以让系统在极端负载下分流和优先收集数据。
eBPF 的局限性
虽然 eBPF 为发掘性能瓶颈提供了显著的优势,但没有任何技术是完美的。eBPF 有一些限制,如下所述(幸运的是,由于 SkyWalking 不依赖 eBPF,其影响是有限的):
- Linux 版本要求:eBPF 程序需要的 Linux 内核版本要 4.4 以上,更新的内核版本可以提供更多的数据收集。BCC 记录了 不同 Linux 内核版本所支持的功能,不同版本之间的差异在于 eBPF 收集的数据集。
- 需要特权权限:所有打算将 eBPF 程序加载到 Linux 内核的进程必须在特权模式下运行。因此,代码中的错误或其他问题可能对安全有很大的影响。
- 对动态语言的支持较弱:eBPF 对基于 JIT 的动态语言,如 Java,支持较弱。这也取决于你想收集什么数据。对于 Profiling,eBPF 不支持解析程序的字符表(symbol),这就是为什么大多数基于 eBPF 的剖析技术只支持静态语言如 C、C++、Go 和 Rust。然而,字符表映射有时可以通过语言所提供的工具来解决。例如,在 Java 中,可以使用 perf-map-agent 来生成字符表映射。然而,动态语言不支持附加(
uprobe)功能,而这种功能可以让我们通过符号追踪执行事件。
SkyWalking Rover 简介
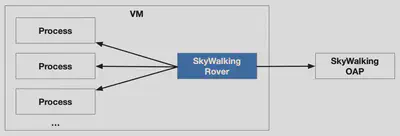
SkyWalking Rover 是 SkyWalking 生态系统中引入的 eBPF 剖析功能。下图显示了 SkyWalking Rover 的整体架构。SkyWalking Rover 目前支持 Kubernetes 环境,必须部署在 Kubernetes 集群内。与 SkyWalking 后端服务器建立连接后,它将当前机器上的进程信息保存到 SkyWalking。当用户通过用户界面创建 eBPF 剖析任务时,SkyWalking Rover 会接收任务并在相关的基于 C、C++、Golang 和 Rust 语言的程序中执行。
除了需要具有 eBPF 功能的内核外,部署 SkyWalking Rover 没有其他先决条件。
使用 Rover 进行 CPU 剖析
CPU 剖析是显示服务性能的最直观方式。受 Brendan Gregg 的博客文章 的启发,我们将 CPU 剖析分为两种类型,并在 Rover 中加以实施:
-
CPU 剖析:线程在 CPU 上的运行时间。
-
off-CPU 剖析:线程在 I/O、锁、定时器、分页 / 交换等方面被阻塞时的等待时间。
用 eBPF 对 Envoy 进行剖析
Envoy 是一个流行的代理,在 Istio 服务网格中被用作为数据平面。在 Kubernetes 集群中,Istio 将 Envoy 作为 sidecar 注入到每个服务的 pod 中,在那里透明地拦截和处理传入和传出的流量。作为数据平面,Envoy 的任何性能问题都会影响到网格中的所有服务流量。在这种情况下,使用 eBPF 剖析来分析生产中由服务网格引起的问题是比较有力的。
演示环境
如果你想看到详细过程,我们已经建立了一个演示环境,在那里我们部署了一个 Nginx 服务进行压力测试。流量被 Envoy 拦截并转发到 Nginx。安装整个环境的命令可以在 GitHub 上获取。
CPU 剖析
当服务的 CPU 使用率很高时,CPU 剖析适用于分析线程堆栈。如果堆栈被转储的次数较多,意味着线程堆栈占据了更多的 CPU 资源。
在使用演示配置文件安装 Istio 时,我们发现有两个地方的性能可以优化:
- Zipkin 追踪:不同的 Zipkin 采样百分比对 QPS 有直接影响。
- 访问日志格式:减少 Envoy 访问日志的字段可以提高 QPS。
Zipkin 追踪
Zipkin 100% 采样
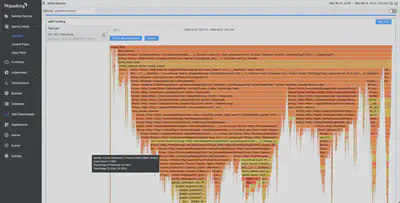
在默认的演示配置文件中,Envoy 使用 100% 采样作为默认的追踪策略。这对性能有什么影响?
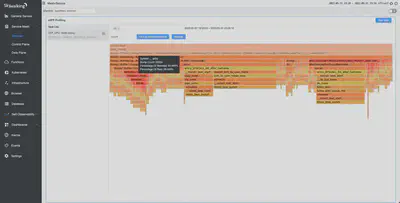
如下图所示,使用 CPU 剖析,我们发现它大约需要 16% 的 CPU 开销。在固定消耗 2 个 CPU 的情况下,其 QPS 可以达到 5.7K。
禁用 Zipkin 追踪
此时,我们发现,如果没有必要,可以降低 Zipkin 采样比例,甚至可以禁用追踪。根据 Istio 文档,我们可以在安装 Istio 时使用以下命令禁用追踪。
istioctl install -y --set profile=demo \
--set 'meshConfig.enableTracing=false' \
--set 'meshConfig.defaultConfig.tracing.sampling=0.0'
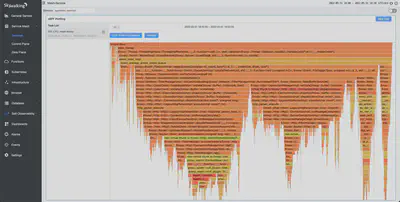
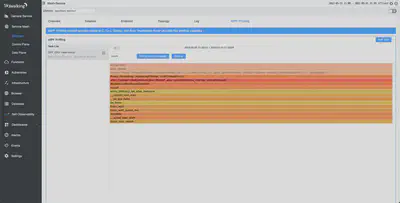
禁用追踪后,我们再次进行 CPU 剖析。根据下图,我们发现 Zipkin 已经从火焰图中消失了。在与前面的例子相同的 2 个 CPU 消耗下,QPS 达到 9K,几乎增加了 60%。
追踪吞吐量
在 CPU 使用率相同的情况下,我们发现,当追踪功能被禁用时,Envoy 的性能会大大提升。当然,这需要我们在 Zipkin 收集的样本数量和 Envoy 的预期性能(QPS)之间做出权衡。
下表说明了在相同的 CPU 使用率下,不同的 Zipkin 采样比例对 QPS 的影响。
| Zipkin 采样比例 | QPS | CPU | 备注 |
|---|---|---|---|
| 100% (默认) | 5.7K | 2 | Zipkin 占用 16% |
| 1% | 8.1K | 2 | Zipkin 占用 0.3% |
| 禁用 | 9.2K | 2 | Zipkin 占用 0% |
访问日志格式
默认访问日志格式
在默认的演示配置文件中,默认的访问日志格式包含大量的数据。下面的火焰图显示了在解析数据时涉及的各种功能,如请求头、响应头和流媒体主体。

简化访问日志格式
通常情况下,我们不需要访问日志中的所有信息,所以我们通常可以简化它来获得我们需要的信息。下面的命令简化了访问日志的格式,只显示基本信息。
istioctl install -y --set profile=demo \
--set meshConfig.accessLogFormat="[% START_TIME%] \"% REQ (:METHOD)% % REQ (X-ENVOY-ORIGINAL-PATH?:PATH)% % PROTOCOL%\"% RESPONSE_CODE%\n"
简化访问日志格式后,我们发现 QPS 从 5.7K 增加到 5.9K。当再次执行 CPU 剖析时,日志格式化的 CPU 使用率从 2.4% 下降到 0.7%。
简化日志格式帮助我们提高了性能。
Off-CPU 剖析
Off-CPU 剖析适用于由非高 CPU 使用率引起的性能问题。例如,当一个服务中有太多的线程时,使用 off-CPU 剖析可以揭示出哪些线程花费了更多的时间进行上下文切换。
我们提供两个维度的数据汇总。
- 切换次数:一个线程切换上下文的次数。当线程返回到 CPU 时,它完成了一次上下文切换。开关次数较多的线程栈会花费更多时间进行上下文切换。
- 切换持续时间:一个线程切换上下文所需的时间。切换持续时间较长的线程栈在 off-CPU 花费的时间较多。
写入访问日志
启用写入
使用与之前 CPU 测试相同的环境和设置,我们进行了 off-CPU 剖析。如下图所示,我们发现访问日志的写入占总上下文切换的 28% 左右。下图中的 __write 也表明这是 Linux 内核中的方法。
禁用写入
SkyWalking 实现了 Envoy 的访问日志服务(ALS)功能,允许我们使用 gRPC 协议将访问日志发送到 SkyWalking 可观察性分析平台(OAP)。即使禁用访问日志,我们仍然可以使用 ALS 来捕获 / 汇总日志。我们使用以下命令禁用了对访问日志的写入。
istioctl install -y --set profile=demo --set meshConfig.accessLogFile=""
禁用访问日志功能后,我们进行了 off-CPU 剖析。如下图所示,文件写入条目已经消失了。Envoy 的吞吐量也从 5.7K 增加到 5.9K。
总结
在这篇文章中,我们研究了 Apache SkyWalking 的 Trace Profiling 可以给我们带来的启示,以及使用 eBPF 剖析可以实现的更多功能。所有这些功能都在 skywalking-rover 中实现。除了 CPU 和 off-CPU 剖析之外,你还会发现以下功能:
- 连续剖析,帮助你自动剖析,无需人工干预。例如,当 Rover 检测到 CPU 超过一个可配置的阈值时,它会自动执行 CPU 剖析任务。
- 更多的剖析类型,以丰富使用场景,如网络和内存剖析。
Tetrate 工程师, Apache SkyWalking PMC 成员
Tetrate 创始工程师,Apache SkyWalking 作者